





Tesla
Tesla annuncia l'addio anche ai sensori a ultrasuoni. Tutti gli ADAS saranno basati su Tesla Vision
di Massimiliano Zocchi pubblicata il 05 Ottobre 2022, alle 08:31 nel canale Auto Elettriche
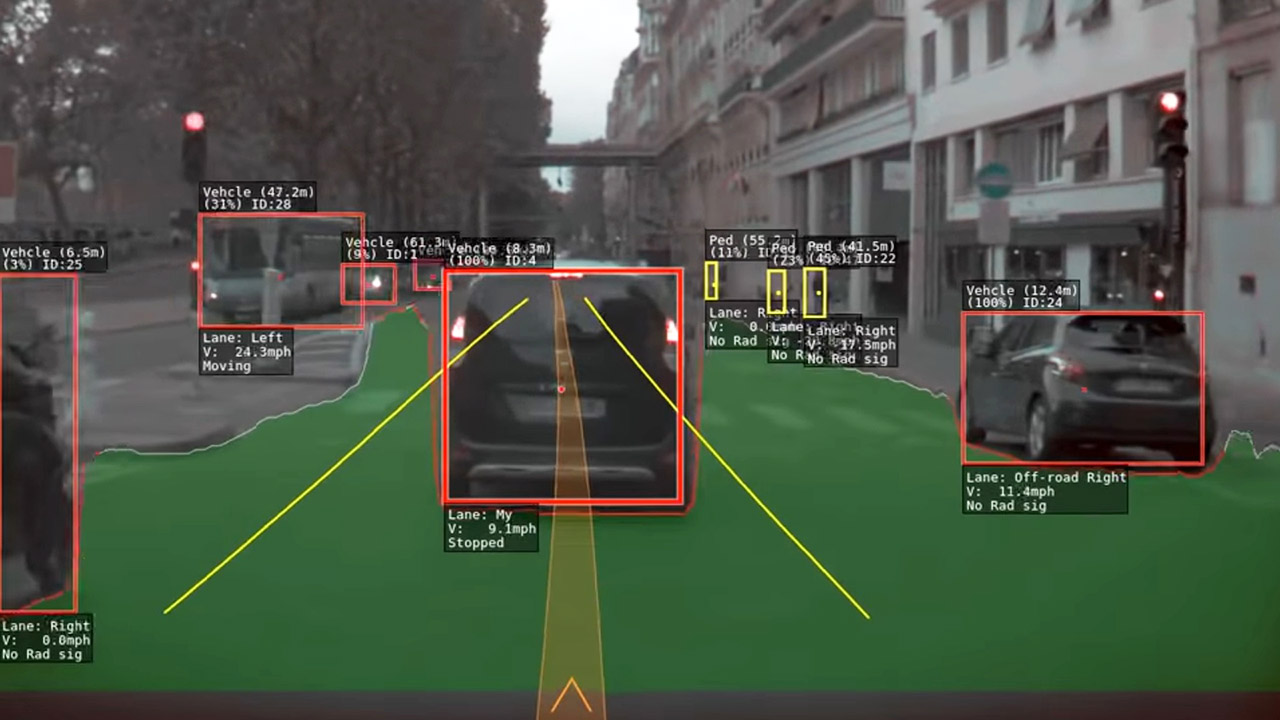
Dopo il criticato addio al radar frontale, Tesla annuncia che d'ora in poi non utilizzerà più nemmeno gli ultrasuoni per i sensori di prossimità. Ancora una volta sarà la vista artificiale Tesla Vision ad occuparsi di tutto



 TCL 65C7K, televisore Mini-LED di qualità, versatile e dal prezzo competitivo
TCL 65C7K, televisore Mini-LED di qualità, versatile e dal prezzo competitivo Fujifilm X-E5: la Fuji X che tutti gli appassionati volevano
Fujifilm X-E5: la Fuji X che tutti gli appassionati volevano Recensione REDMAGIC 10S Pro: il gaming phone definitivo?
Recensione REDMAGIC 10S Pro: il gaming phone definitivo? La missione cinese Apophis Recon Swarm (ARS) vuole raggiungere e studiare l'asteroide Apophis
La missione cinese Apophis Recon Swarm (ARS) vuole raggiungere e studiare l'asteroide Apophis Offerta Starlink kit Standard: l'hardware non si paga, rimane l'abbonamento mensile a partire da 29 euro
Offerta Starlink kit Standard: l'hardware non si paga, rimane l'abbonamento mensile a partire da 29 euro 3I/ATLAS è la cometa interstellare che attraverserà il Sistema Solare e che gli scienziati vogliono studiare
3I/ATLAS è la cometa interstellare che attraverserà il Sistema Solare e che gli scienziati vogliono studiare















47 Commenti
Gli autori dei commenti, e non la redazione, sono responsabili dei contenuti da loro inseriti - infoQuindi la domanda è senza aggiungerne una come fanno a dirmi se ho qualcosa davanti ? E se l'aggiungono come fanno con le auto già vendute se disattivano i sensori ad ultrasuoni ? Sfera di cristallo A.I. :-)
pensavo che la avesse..
sia sulla bmw che sulla mercedes c'è la telecamera sulla griglia per vedere davanti e due telecamere sulla parte alta del parabrezza
inoltre sulla parte bassa ho il radar anticollisione in entrambe
mi fa strano pensare che tesla lesini su queste cose visto i costi..
anche perchè è normale in certe situazioni fare fatica a vedere i problemi..
mi viene in mente la neve.. la nebbia.. certi momenti controluce.. etc..
dove il radar a volte mi ha avvisato di cose che ho tardato a vedere (non con la neve che il radar si disattiva)
boh.. ma si sa.. se puoi risparmiare dei soldi e far pagare alla gente alcuni imprenditori non ci pensano due volte
Sono arrivati a sviluppare un supercomputer ottimizzato per le loro particolari esigenze di machine learning che é basato su processori ad hoc con tradeoff molto diversi da quanto altri hanno messo in commercio.
Su Chips&Cheese ne hanno fatto un analisi molto dettagliata:
https://chipsandcheese.com/2022/09/...roarchitecture/
Fossi al loro posto punterei almeno anche sullo sviluppo di telecamere tipo event camera, ma da come stanno procedendo sembra siano intenzionati a implementare in software (o forse su fpga) tutto l'event processing a partire da immagini raster usando reti neurali addestrate con il loro supercomputer Dojo.
Mi chiedo cosa hanno in fase di sviluppo avanzato da portarli a decisioni come queste.
Sono arrivati a sviluppare un supercomputer ottimizzato per le loro particolari esigenze di machine learning che é basato su processori ad hoc con tradeoff molto diversi da quanto altri hanno messo in commercio.
Su Chips&Cheese ne hanno fatto un analisi molto dettagliata:
https://chipsandcheese.com/2022/09/...roarchitecture/
Fossi al loro posto punterei almeno anche sullo sviluppo di telecamere tipo event camera, ma da come stanno procedendo sembra siano intenzionati a implementare in software (o forse su fpga) tutto l'event processing a partire da immagini raster usando reti neurali addestrate con il loro supercomputer Dojo.
Mi chiedo cosa hanno in fase di sviluppo avanzato da portarli a decisioni come queste.
l'uomo non guida solo con gli occhi, guida pure col cu*o
a parte gli scherzi mi pare evidente sia sulle auto e sia sui robot vogliano usare lo stesso sistema di adeguamento allo spazio circostante basato sulle camere.
comunque continuo a non seguire il fine delle critiche sul "solo la vista non basta". personalmente immaginandomi con una vista a 360 gradi, vedendo a lunghissima distanza e riflessi sovrannaturali non riesco a immaginarsi nessuna situazione in cui avrei bisogno di un qualsiasi altro sensore per evitare situazioni pericolose. se ipoteticamente fossi quasi totalmente accecato semplicemente farei in modo di accostare o adeguerei il mio andamento in base alla visuale (un pò come già succede oggi sulle strade in caso di scarsa visibilità
a parte gli scherzi mi pare evidente sia sulle auto e sia sui robot vogliano usare lo stesso sistema di adeguamento allo spazio circostante basato sulle camere.
comunque continuo a non seguire il fine delle critiche sul "solo la vista non basta". personalmente immaginandomi con una vista a 360 gradi, vedendo a lunghissima distanza e riflessi sovrannaturali non riesco a immaginarsi nessuna situazione in cui avrei bisogno di un qualsiasi altro sensore per evitare situazioni pericolose. se ipoteticamente fossi quasi totalmente accecato semplicemente farei in modo di accostare o adeguerei il mio andamento in base alla visuale (un pò come già succede oggi sulle strade in caso di scarsa visibilità
guidando in città capita spesso di ricevere flash di luce da superfici riflettenti in certe ore del giorno..
alba e tramonto per citarne alcune in cui abbassi le alette per non avere la luce negli occhi, momenti in cui le telecamere (anche le HDR) vengono accecate.. e in questo caso un secondo di reazione è un'enormità in città.. stiri facile il pedone che crede tu lo abbia visto.
un lidar non viene accecato dal sole e neanche un volgare radar.
capisco che muschio debba fare miliardi ma la vista non è perfetta in tutte le situazioni.. una cacca di un uccello puo' accecare una telecamera da 1 cm.. non puo' fermare un lidar ma alla peggio gli crea un disturbo
idem per il radar che non viene imbrogliato dalla foglia che raccogli in viaggio e si piazza li davanti
economiche e migliorabili le telecamere ma non ci affiderò mai la guida del mio veicolo visto che la responsabilità è la mia e ci sto io dentro alla macchina
sarei curioso di vedere come distingue un quadro realistico stile Bee-Beep disegnato su un muro in curva.. visto che tesla ha dimostrato di centrare camion grigi che non hanno contrasto con il cielo ceruleo..
sono contento per lui che è miliardario ma la mia tranquillità non si accontenta delle sue scorciatoie
Sì e no. Non confondere i canali sensoriali che usiamo per acquisire informazioni sulla dinamica del veicolo con i canali sensoriali che usiamo per acquisire informazioni sull'ambiente nel quale il veicolo si muove.
Nella prima categoria ci sono il nostro senso vestibolare e i vari input "meccanici" come il feedback dal volante sulle mani. I veicoli moderni hanno già tutti gli equivalenti più sofisticati di questi canali sensoriali (accelerometro a 3 assi e giroscopio a 3 assi, sensore dell'angolo di sterzo, ecc.). I sistemi di gestione del veicolo, anche senza guida autonoma, hanno già più dati sulla dinamica rispetto a quelli ricavabili dai sensi del guidatore (ad esempio coppia motrice, velocità delle singole ruote, angolo di rollio, velocità di imbardata, ecc.). Sono i dati alla base del funzionamento di ABS, ESP, traction control, torque vectoring e quant'altro.
Nella seconda categoria ci sono i nostri sensi che permettono di percepire il mondo al di fuori del veicolo. Gli esseri umani hanno solo tre sensi che funzionano a distanza: vista, udito e olfatto. L'olfatto non è molto utile alla guida, al massimo ci avvisa quando il veicolo sta bruciando, o quando siamo finiti in un mucchio di letame. L'udito ci è a volte utile per percepire eventi fuori dal nostro campo visivo, per questo motivo abbiamo inventato i segnalatori acustici (clacson, sirene e simili). La vista è chiaramente il senso principale, in pratica quasi l'unico che utilizziamo per percepire l'ambiente ovvero la strada, gli altri veicoli, i pedoni, i segnali stradali, gli animali e quant'altro possiamo incontrare alla guida.
In prospettiva la scelta di basare l'input ambientale per la guida autonoma esclusivamente sulla visione è probabilmente la più sensata, proprio perché noi facciamo altrettanto e quando non ci distraiamo andiamo benino, anche se abbiamo un input visivo molto più limitato (pure con l'ausilio degli specchi retrovisori). I vari radar e lidar sono stati finora utilizzati per sopperire alle limitazioni hw e sw dei sistemi di visione artificiale, ma non c'è un motivo sostanziale perché la visione non possa progredire fino al punto di non aver più bisogno di stampelle.
Circa la notizia: i sensori di parcheggio non c'entrano nulla con la guida autonoma, e mi pare strano che possano essere eliminati perché con i sensori di immagine sarà difficile percepire ostacoli bassi molto vicini ai paraurti, in fase di uscita dai parcheggi o simili. Ma avranno fatto i loro conti.
Basta guardare l'ultimo Tesla AI Day per farsi un'idea di cosa stanno facendo:
https://youtu.be/ODSJsviD_SU?t=3483
Nella prima categoria ci sono il nostro senso vestibolare e i vari input "meccanici" come il feedback dal volante sulle mani. I veicoli moderni hanno già tutti gli equivalenti più sofisticati di questi canali sensoriali (accelerometro a 3 assi e giroscopio a 3 assi, sensore dell'angolo di sterzo, ecc.). I sistemi di gestione del veicolo, anche senza guida autonoma, hanno già più dati sulla dinamica rispetto a quelli ricavabili dai sensi del guidatore (ad esempio coppia motrice, velocità delle singole ruote, angolo di rollio, velocità di imbardata, ecc.). Sono i dati alla base del funzionamento di ABS, ESP, traction control, torque vectoring e quant'altro.
Nella seconda categoria ci sono i nostri sensi che permettono di percepire il mondo al di fuori del veicolo. Gli esseri umani hanno solo tre sensi che funzionano a distanza: vista, udito e olfatto. L'olfatto non è molto utile alla guida, al massimo ci avvisa quando il veicolo sta bruciando, o quando siamo finiti in un mucchio di letame. L'udito ci è a volte utile per percepire eventi fuori dal nostro campo visivo, per questo motivo abbiamo inventato i segnalatori acustici (clacson, sirene e simili). La vista è chiaramente il senso principale, in pratica quasi l'unico che utilizziamo per percepire l'ambiente ovvero la strada, gli altri veicoli, i pedoni, i segnali stradali, gli animali e quant'altro possiamo incontrare alla guida.
In prospettiva la scelta di basare l'input ambientale per la guida autonoma esclusivamente sulla visione è probabilmente la più sensata, proprio perché noi facciamo altrettanto e quando non ci distraiamo andiamo benino, anche se abbiamo un input visivo molto più limitato (pure con l'ausilio degli specchi retrovisori). I vari radar e lidar sono stati finora utilizzati per sopperire alle limitazioni hw e sw dei sistemi di visione artificiale, ma non c'è un motivo sostanziale perché la visione non possa progredire fino al punto di non aver più bisogno di stampelle.
Circa la notizia: i sensori di parcheggio non c'entrano nulla con la guida autonoma, e mi pare strano che possano essere eliminati perché con i sensori di immagine sarà difficile percepire ostacoli bassi molto vicini ai paraurti, in fase di uscita dai parcheggi o simili. Ma avranno fatto i loro conti.
Basta guardare l'ultimo Tesla AI Day per farsi un'idea di cosa stanno facendo:
https://youtu.be/ODSJsviD_SU?t=3483
Quello che serve è un sistema per vedere nella nebbia ed avvisi di un pericolo.
Se vado a 130km/h in autostrada e mi trovo in un banco di nebbia di cui non mi ero accorto........ freno si..... ma mi trovo qualche secondo senza vedere dove vado. Stessa cosa le telecamere. IL RADAR o lidar serve per queste situazioni. Della guida autonoma posso farne a meno..... (guido io come ho fatto negli ultimi 35 anni....... ) un sistema di sicurezza in più come un radar però sarebbe veramente molto utile, anche costasse 500 in più a macchina!
(Magari non in una citycar che se non esce dalla città non vedrà mai la nebbia, ma in qualsiasi auto che possa andare in autostrada direi che è indispensabile.....)
Se vado a 130km/h in autostrada e mi trovo in un banco di nebbia di cui non mi ero accorto........ freno si..... ma mi trovo qualche secondo senza vedere dove vado. Stessa cosa le telecamere. IL RADAR o lidar serve per queste situazioni. Della guida autonoma posso farne a meno..... (guido io come ho fatto negli ultimi 35 anni....... ) un sistema di sicurezza in più come un radar però sarebbe veramente molto utile, anche costasse 500€ in più a macchina!
(Magari non in una citycar che se non esce dalla città non vedrà mai la nebbia, ma in qualsiasi auto che possa andare in autostrada direi che è indispensabile.....)
ipotizzo nella situazione da te descritta succeda questo (o quantomeno dovrebbe succedere):
-l'auto rileva il banco di nebbia a distanza e rallenta (molto meglio di arrivare nel banco e inchiodare)
-dentro il banco di nebbia andrà a una velocità molto bassa
molto semplicemente non si creerà un pericolo
Devi effettuare il login per poter commentare
Se non sei ancora registrato, puoi farlo attraverso questo form.
Se sei già registrato e loggato nel sito, puoi inserire il tuo commento.
Si tenga presente quanto letto nel regolamento, nel rispetto del "quieto vivere".